
Press Ctrl+ and K to search
请注意,本文编写于 1240 天前,最后修改于 1229 天前,其中某些信息可能已经过时。
目录
上文中介绍了C#ModBus Tcp的学习及Master的实现,本篇介绍串口实现Modbus RTU。
Modbus协议目前存在用于串口、以太网以及其他支持互联网协议的网络的版本。
实现
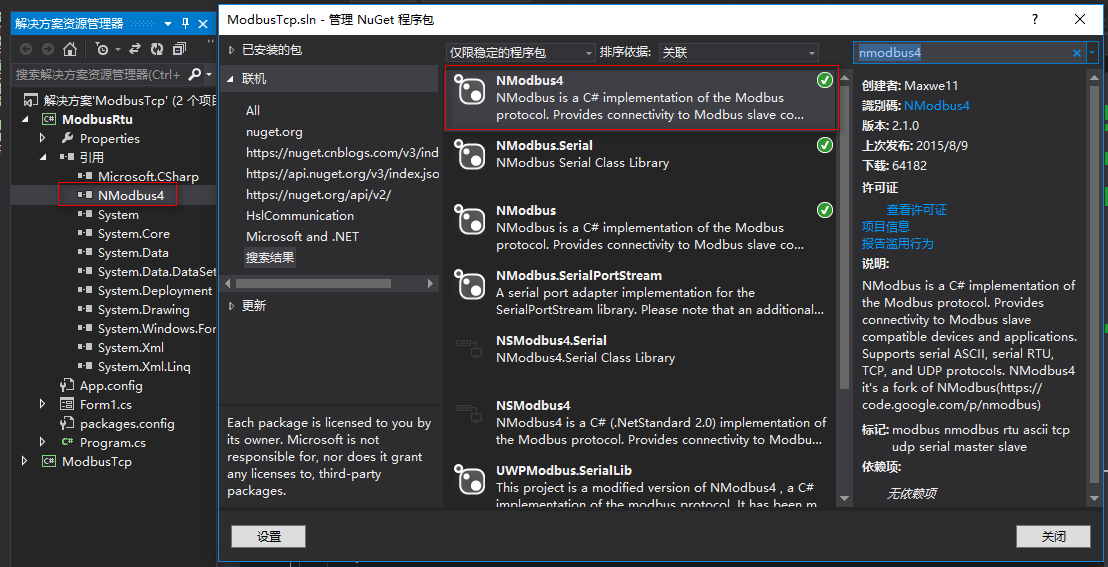
引用NModbus4
Modbus RTU实现依然借助开源库NModbus4,在vs中.打开NuGet管理器.安装NModbus4
代码实现
实现与之前的Modbus Tcp的实现类似 ,只是在实例化master时将TCPClient换为串行端口资源SerialPort,并在实例化是设置好端口所需参数(端口名,波特率,校验位,停止位,数据位)。
csharpusing System;
using System.Collections.Generic;
using System.ComponentModel;
using System.Data;
using System.Drawing;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using System.Windows.Forms;
using Modbus.Device;
using System.Net.Sockets;
using System.Threading;
using System.IO.Ports;
namespace ModbusRtu
{
public partial class Form1 : Form
{
private static IModbusMaster master;
private static SerialPort port;
//写线圈或写寄存器数组
private bool[] coilsBuffer;
private ushort[] registerBuffer;
//功能码
private string functionCode;
//参数(分别为站号,起始地址,长度)
private byte slaveAddress;
private ushort startAddress;
private ushort numberOfPoints;
//串口参数
private string portName;
private int baudRate;
private Parity parity;
private int dataBits;
private StopBits stopBits;
public Form1()
{
InitializeComponent();
}
private void Form1_Load(object sender, EventArgs e)
{
cmb_portname.SelectedIndex = 0;
cmb_baud.SelectedIndex = 5;
cmb_parity.SelectedIndex = 2;
cmb_databBits.SelectedIndex = 1;
cmb_stopBits.SelectedIndex = 0;
}
private SerialPort InitSerialPortParameter()
{
if (cmb_portname.SelectedIndex < 0 || cmb_baud.SelectedIndex < 0 || cmb_parity.SelectedIndex < 0 || cmb_databBits.SelectedIndex < 0 || cmb_stopBits.SelectedIndex < 0)
{
MessageBox.Show("请选择串口参数");
return null;
}
else
{
portName = cmb_portname.SelectedItem.ToString();
baudRate = int.Parse(cmb_baud.SelectedItem.ToString());
switch (cmb_parity.SelectedItem.ToString())
{
case "奇":
parity = Parity.Odd;
break;
case "偶":
parity = Parity.Even;
break;
case "无":
parity = Parity.None;
break;
default:
break;
}
dataBits = int.Parse(cmb_databBits.SelectedItem.ToString());
switch (cmb_stopBits.SelectedItem.ToString())
{
case "1":
stopBits = StopBits.One;
break;
case "2":
stopBits = StopBits.Two;
break;
default:
break;
}
port = new SerialPort(portName, baudRate, parity, dataBits, stopBits);
return port;
}
}
/// <summary>
/// 读/写
/// </summary>
/// <param name="sender"></param>
/// <param name="e"></param>
private void button1_Click(object sender, EventArgs e)
{
try
{
//初始化串口参数
InitSerialPortParameter();
master = ModbusSerialMaster.CreateRtu(port);
ExecuteFunction();
}
catch (Exception)
{
MessageBox.Show("初始化异常");
}
}
private async void ExecuteFunction()
{
try
{
//每次操作是要开启串口 操作完成后需要关闭串口
//目的是为了slave更换连接是不报错
if (port.IsOpen == false)
{
port.Open();
}
if (functionCode != null)
{
switch (functionCode)
{
case "01 Read Coils"://读取单个线圈
SetReadParameters();
coilsBuffer = master.ReadCoils(slaveAddress, startAddress, numberOfPoints);
for (int i = 0; i < coilsBuffer.Length; i++)
{
SetMsg(coilsBuffer[i] + " ");
}
SetMsg("\r\n");
break;
case "02 Read DisCrete Inputs"://读取输入线圈/离散量线圈
SetReadParameters();
coilsBuffer = master.ReadInputs(slaveAddress, startAddress, numberOfPoints);
for (int i = 0; i < coilsBuffer.Length; i++)
{
SetMsg(coilsBuffer[i] + " ");
}
SetMsg("\r\n");
break;
case "03 Read Holding Registers"://读取保持寄存器
SetReadParameters();
registerBuffer = master.ReadHoldingRegisters(slaveAddress, startAddress, numberOfPoints);
for (int i = 0; i < registerBuffer.Length; i++)
{
SetMsg(registerBuffer[i] + " ");
}
SetMsg("\r\n");
break;
case "04 Read Input Registers"://读取输入寄存器
SetReadParameters();
registerBuffer = master.ReadInputRegisters(slaveAddress, startAddress, numberOfPoints);
for (int i = 0; i < registerBuffer.Length; i++)
{
SetMsg(registerBuffer[i] + " ");
}
SetMsg("\r\n");
break;
case "05 Write Single Coil"://写单个线圈
SetWriteParametes();
await master.WriteSingleCoilAsync(slaveAddress, startAddress, coilsBuffer[0]);
break;
case "06 Write Single Registers"://写单个输入线圈/离散量线圈
SetWriteParametes();
await master.WriteSingleRegisterAsync(slaveAddress, startAddress, registerBuffer[0]);
break;
case "0F Write Multiple Coils"://写一组线圈
SetWriteParametes();
await master.WriteMultipleCoilsAsync(slaveAddress, startAddress, coilsBuffer);
break;
case "10 Write Multiple Registers"://写一组保持寄存器
SetWriteParametes();
await master.WriteMultipleRegistersAsync(slaveAddress, startAddress, registerBuffer);
break;
default:
break;
}
}
else
{
MessageBox.Show("请选择功能码!");
}
port.Close();
}
catch (Exception ex)
{
MessageBox.Show(ex.Message);
}
}
private void comboBox1_SelectedIndexChanged(object sender, EventArgs e)
{
if (comboBox1.SelectedIndex >= 4)
{
groupBox2.Enabled = true;
groupBox1.Enabled = false;
}
else
{
groupBox1.Enabled = true;
groupBox2.Enabled = false;
}
comboBox1.Invoke(new Action(() => { functionCode = comboBox1.SelectedItem.ToString(); }));
}
/// <summary>
/// 初始化读参数
/// </summary>
private void SetReadParameters()
{
if (txt_startAddr1.Text == "" || txt_slave1.Text == "" || txt_length.Text == "")
{
MessageBox.Show("请填写读参数!");
}
else
{
slaveAddress = byte.Parse(txt_slave1.Text);
startAddress = ushort.Parse(txt_startAddr1.Text);
numberOfPoints = ushort.Parse(txt_length.Text);
}
}
/// <summary>
/// 初始化写参数
/// </summary>
private void SetWriteParametes()
{
if (txt_startAddr2.Text == "" || txt_slave2.Text == "" || txt_data.Text == "")
{
MessageBox.Show("请填写写参数!");
}
else
{
slaveAddress = byte.Parse(txt_slave2.Text);
startAddress = ushort.Parse(txt_startAddr2.Text);
//判断是否写线圈
if (comboBox1.SelectedIndex == 4 || comboBox1.SelectedIndex == 6)
{
string[] strarr = txt_data.Text.Split(' ');
coilsBuffer = new bool[strarr.Length];
//转化为bool数组
for (int i = 0; i < strarr.Length; i++)
{
// strarr[i] == "0" ? coilsBuffer[i] = true : coilsBuffer[i] = false;
if (strarr[i] == "0")
{
coilsBuffer[i] = false;
}
else
{
coilsBuffer[i] = true;
}
}
}
else
{
//转化ushort数组
string[] strarr = txt_data.Text.Split(' ');
registerBuffer = new ushort[strarr.Length];
for (int i = 0; i < strarr.Length; i++)
{
registerBuffer[i] = ushort.Parse(strarr[i]);
}
}
}
}
/// <summary>
/// 清除文本
/// </summary>
/// <param name="sender"></param>
/// <param name="e"></param>
private void button2_Click(object sender, EventArgs e)
{
richTextBox1.Clear();
}
/// <summary>
/// SetMessage
/// </summary>
/// <param name="msg"></param>
public void SetMsg(string msg)
{
richTextBox1.Invoke(new Action(() => { richTextBox1.AppendText(msg); }));
}
}
}
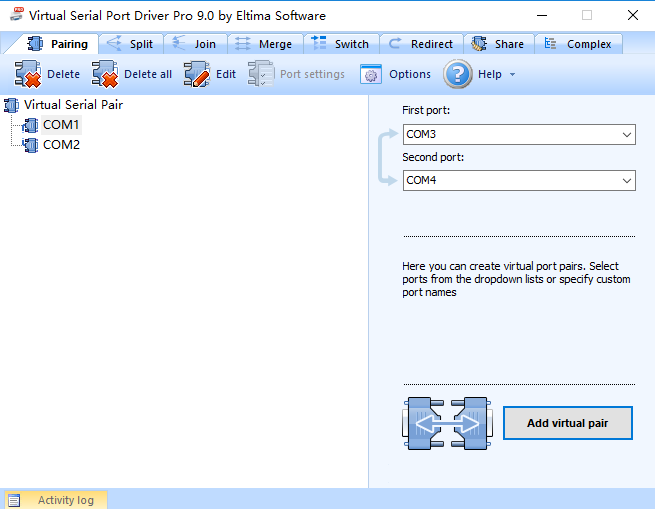
测试准备
借助工具 Virtual Serial Port Dirver 虚拟串口工具。
链接:https://pan.baidu.com/s/1opGre3GS-HWFoA_dP9qYYg
提取码:2afu
-
借助工具我们添加两个虚拟串口 COM1和COM2 点击 Add Virtual Pair 添加:
-
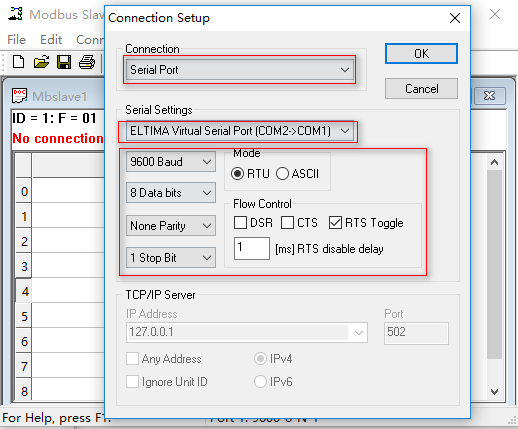
设置Modbus Slave,选择连接方式为串口,选择对应端口,模式选择RTU,建立连接:
测试开始
-
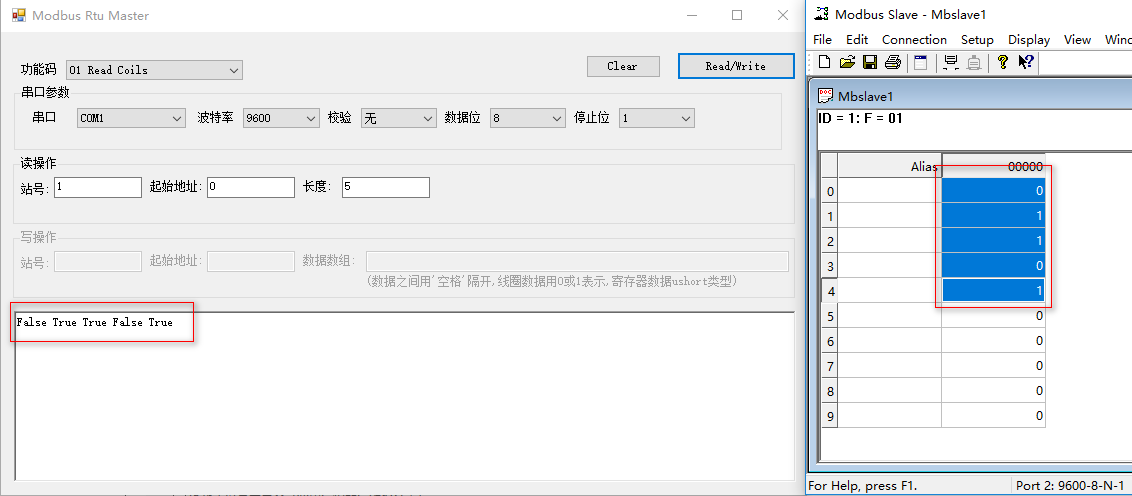
运行上文实现的Modbus RTU Master;
-
设置串口参数(波特率,数据位,奇偶校验,停止位)要与Slave的串口参数一致:
测试 功能码 0x01 读一组线圈
到此为止,Modbus的学习到此结束。若有错误之处,欢迎大家指正。
本文作者:Peter.Pan
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!
目录