
目录
Modbus已经成为工业领域通信协议的业界标准(De facto),并且现在是工业电子设备之间常用的连接方式。 所以这也是我们工控领域软件开发的所必懂的通讯协议。
协议概述
-
Modbus协议是应用于控制器上的一种通用语言,实现控制器之间,控制器通过网络和其他设备之间的通信,支持传统RS232/RS422/RS485和以太网设备,它已经成为一种通用的工业标准,有了它不同厂商生产的控制设备可以连成工业网络,进行集中控制,此协议定义了一个控制器能认识使用的消息结构
-
如果按照国际 ISO/OSI 的 7 层网络模型来说,标准 MODBUS 协议定义了通信物理层、链路层及应用层;
- 物理层:定义了基于 RS232 和 RS485 的异步串行通信规范; - 链路层:规定了基于站号识别、主 / 从方式的介质访问控制; - 应用层:规定了信息规范(或报文格式)及通信服务功能;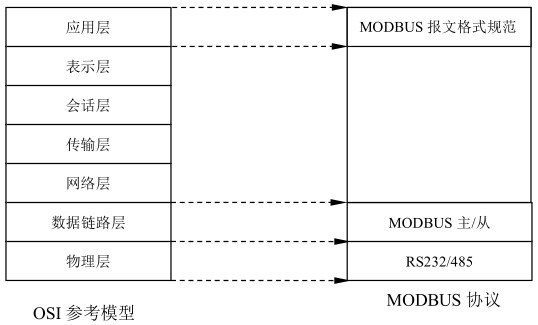
协议要点
-
MODBUS 是主 / 从通信协议。主站主动发送报文 , 只有与主站发送报文中呼叫地址相同的从站才向主站发送回答报文。
-
报文以 0 地址发送时为广播模式,无需从站应答,可作为广播报文发送,包括:
- 修改线圈状态; - 修改寄存器内容; - 强置多线圈; - 预置多寄存器; - 询问诊断; -
MODBUS 规定了 2 种字符传输模式: ASCII 模式、 RTU (二进制)模式;两种传输模式不能混用;

-
传输错误校验
传输错误校验有奇偶校验、冗余校验检验。
当校验出错时,报文处理停止,从机不再继续通信,不对此报文产生应答;
通信错误一旦发生,报文便被视为不可靠; MODBUS 主机在一定时间过后仍未收到从站应答,即作出“通信错误已发生”的判断。
-
报文级(字符级)采用 CRC-16 (循环冗余错误校验)
-
MODBUS 报文 RTU 格式

异常应答
-
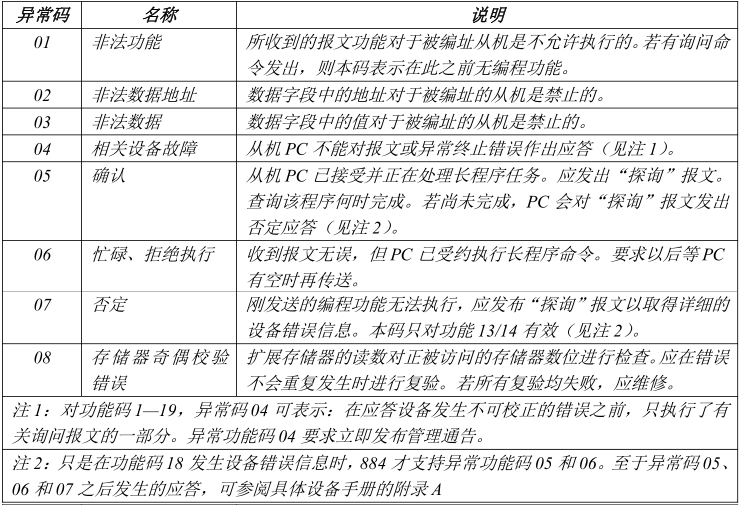
从机接收到的主机报文,没有传输错误,但从机无法正确执行主机命令或无法作出正确应答,从机将以“异常应答”回答之。
-
异常应答报文格式
例:主机发请求报文,功能码 01 :读 1 个 04A1 线圈值

由于从机最高线圈地址为 0400 ,则 04A1 超地址上限,从机作出异常应答如下(注意:功能码最高位置 1 ):

- 异常应答码
寄存器和功能码
modbus的功能码很多,且不同功能码对应的报文也不一致,后续博客我会借用开源库实现一个modbus master 测试功能码 解析报文
下边我用表格总结一下寄存器,功能码,报文格式
注
-
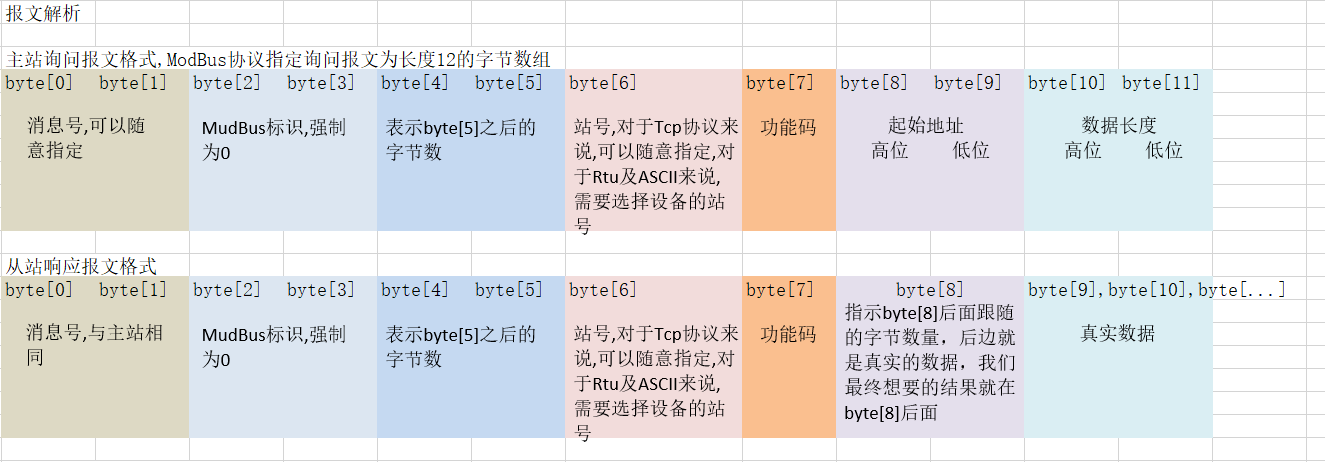
报文中的所有字节均为16进制
-
由上图我们总结出不同的功能码的报文(无论询问报文还是响应报文)前8个字节都是一致的 都是2字节消息号+2字节ModBus标识+2字节长度+1字节站号+1字节功能码 后边根据功能码不同而不同
-
报文中,指定线圈通断标志 FF00 置线圈为ON 0000置线圈为OFF
具体实现
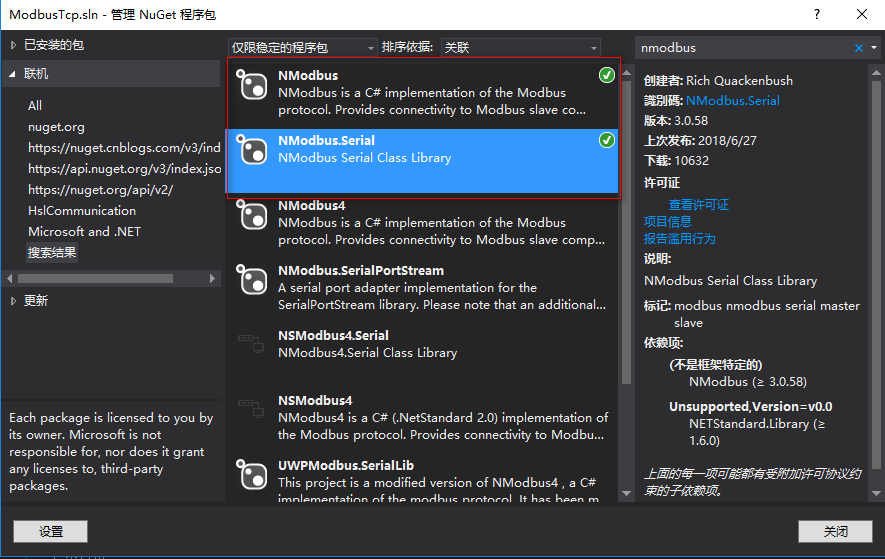
接下来我们使用开源库NModbus库,来实现一个Modbus master
- 创建工程,从NuGet管理器安装NModbusu
 先简单介绍一下NModbus中的几个重要方法
先简单介绍一下NModbus中的几个重要方法
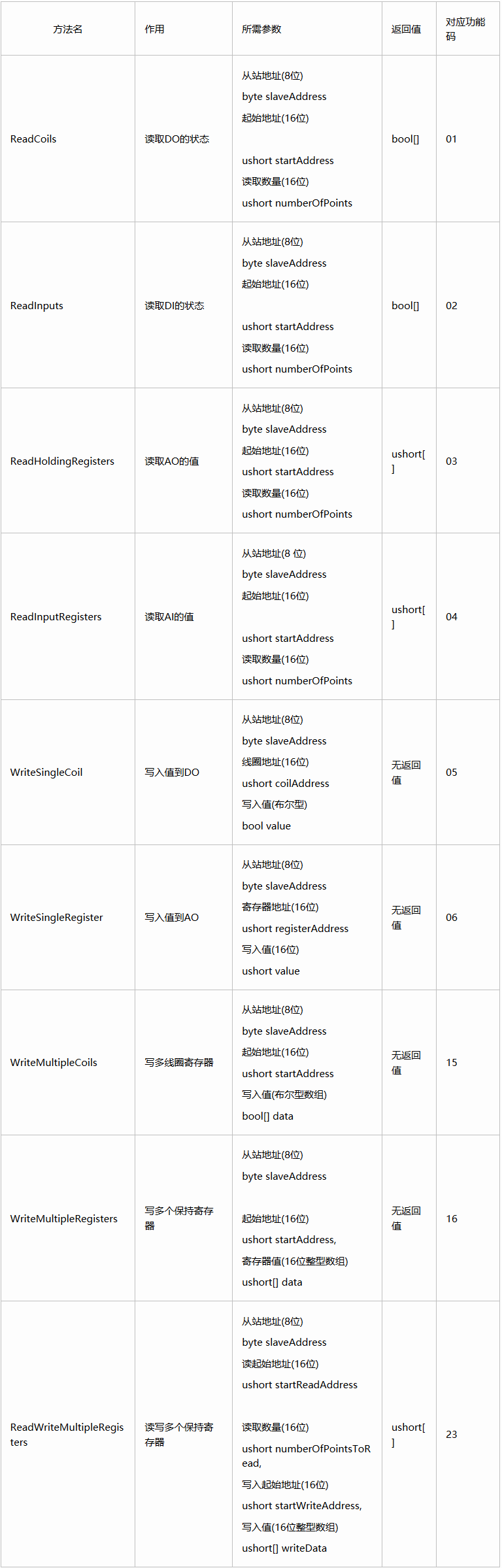
- 具体实现
csharpusing System;
using System.Collections.Generic;
using System.ComponentModel;
using System.Data;
using System.Drawing;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using System.Windows.Forms;
using NModbus;
using System.Net.Sockets;
using System.Threading;
namespace ModbusTcp
{
public partial class Form1 : Form
{
private static ModbusFactory modbusFactory;
private static IModbusMaster master;
//写线圈或写寄存器数组
bool[] coilsBuffer;
ushort[] registerBuffer;
//功能码
string functionCode;
//参数(分别为站号,起始地址,长度)
byte slaveAddress;
ushort startAddress;
ushort numberOfPoints;
public Form1()
{
InitializeComponent();
}
private void Form1_Load(object sender, EventArgs e)
{
//初始化modbusmaster
modbusFactory = new ModbusFactory();
//在本地测试 所以使用回环地址,modbus协议规定端口号 502
master = modbusFactory.CreateMaster(new TcpClient("127.0.0.1", 502));
//设置读取超时时间
master.Transport.ReadTimeout = 2000;
master.Transport.Retries = 2000;
groupBox1.Enabled = false;
groupBox2.Enabled = false;
}
/// <summary>
/// 读/写
/// </summary>
/// <param name="sender"></param>
/// <param name="e"></param>
private void button1_Click(object sender, EventArgs e)
{
ExecuteFunction();
}
private async void ExecuteFunction()
{
try
{
//重新实例化是为了 modbus slave更换连接时不报错
master = modbusFactory.CreateMaster(new TcpClient("127.0.0.1", 502));
if (functionCode != null)
{
switch (functionCode)
{
case "01 Read Coils"://读取单个线圈
SetReadParameters();
coilsBuffer = master.ReadCoils(slaveAddress, startAddress, numberOfPoints);
for (int i = 0; i < coilsBuffer.Length; i++)
{
SetMsg(coilsBuffer[i] + "");
}
break;
case "02 Read DisCrete Inputs"://读取输入线圈/离散量线圈
SetReadParameters();
coilsBuffer = master.ReadInputs(slaveAddress, startAddress, numberOfPoints);
for (int i = 0; i < coilsBuffer.Length; i++)
{
SetMsg(coilsBuffer[i] + "");
}
break;
case "03 Read Holding Registers"://读取保持寄存器
SetReadParameters();
registerBuffer = master.ReadHoldingRegisters(slaveAddress, startAddress, numberOfPoints);
for (int i = 0; i < registerBuffer.Length; i++)
{
SetMsg(registerBuffer[i] + "");
}
break;
case "04 Read Input Registers"://读取输入寄存器
SetReadParameters();
registerBuffer = master.ReadInputRegisters(slaveAddress, startAddress, numberOfPoints);
for (int i = 0; i < registerBuffer.Length; i++)
{
SetMsg(registerBuffer[i] + "");
}
break;
case "05 Write Single Coil"://写单个线圈
SetWriteParametes();
await master.WriteSingleCoilAsync(slaveAddress, startAddress, coilsBuffer[0]);
break;
case "06 Write Single Registers"://写单个输入线圈/离散量线圈
SetWriteParametes();
await master.WriteSingleRegisterAsync(slaveAddress, startAddress, registerBuffer[0]);
break;
case "0F Write Multiple Coils"://写一组线圈
SetWriteParametes();
await master.WriteMultipleCoilsAsync(slaveAddress, startAddress, coilsBuffer);
break;
case "10 Write Multiple Registers"://写一组保持寄存器
SetWriteParametes();
await master.WriteMultipleRegistersAsync(slaveAddress, startAddress, registerBuffer);
break;
default:
break;
}
}
else
{
MessageBox.Show("请选择功能码!");
}
master.Dispose();
}
catch (Exception ex)
{
MessageBox.Show(ex.Message);
}
}
private void comboBox1_SelectedIndexChanged(object sender, EventArgs e)
{
if (comboBox1.SelectedIndex >= 4)
{
groupBox2.Enabled = true;
groupBox1.Enabled = false;
}
else
{
groupBox1.Enabled = true;
groupBox2.Enabled = false;
}
comboBox1.Invoke(new Action(() => { functionCode = comboBox1.SelectedItem.ToString(); }));
}
/// <summary>
/// 初始化读参数
/// </summary>
private void SetReadParameters()
{
if (txt_startAddr1.Text == "" || txt_slave1.Text == "" || txt_length.Text == "")
{
MessageBox.Show("请填写读参数!");
}
else
{
slaveAddress = byte.Parse(txt_slave1.Text);
startAddress = ushort.Parse(txt_startAddr1.Text);
numberOfPoints = ushort.Parse(txt_length.Text);
}
}
/// <summary>
/// 初始化写参数
/// </summary>
private void SetWriteParametes()
{
if (txt_startAddr2.Text == "" || txt_slave2.Text == "" || txt_data.Text == "")
{
MessageBox.Show("请填写写参数!");
}
else
{
slaveAddress = byte.Parse(txt_slave2.Text);
startAddress = ushort.Parse(txt_startAddr2.Text);
//判断是否写线圈
if (comboBox1.SelectedIndex == 4 || comboBox1.SelectedIndex == 6)
{
string[] strarr = txt_data.Text.Split(' ');
coilsBuffer = new bool[strarr.Length];
//转化为bool数组
for (int i = 0; i < strarr.Length; i++)
{
// strarr[i] == "0" ? coilsBuffer[i] = true : coilsBuffer[i] = false;
if (strarr[i] == "0")
{
coilsBuffer[i] = false;
}
else
{
coilsBuffer[i] = true;
}
}
}
else
{
//转化ushort数组
string[] strarr = txt_data.Text.Split(' ');
registerBuffer = new ushort[strarr.Length];
for (int i = 0; i < strarr.Length; i++)
{
registerBuffer[i] = ushort.Parse(strarr[i]);
}
}
}
}
/// <summary>
/// 清除文本
/// </summary>
/// <param name="sender"></param>
/// <param name="e"></param>
private void button2_Click(object sender, EventArgs e)
{
richTextBox1.Clear();
}
/// <summary>
/// SetMessage
/// </summary>
/// <param name="msg"></param>
public void SetMsg(string msg)
{
richTextBox1.Invoke(new Action(() => { richTextBox1.AppendText(msg + "\r\n"); }));
}
}
}
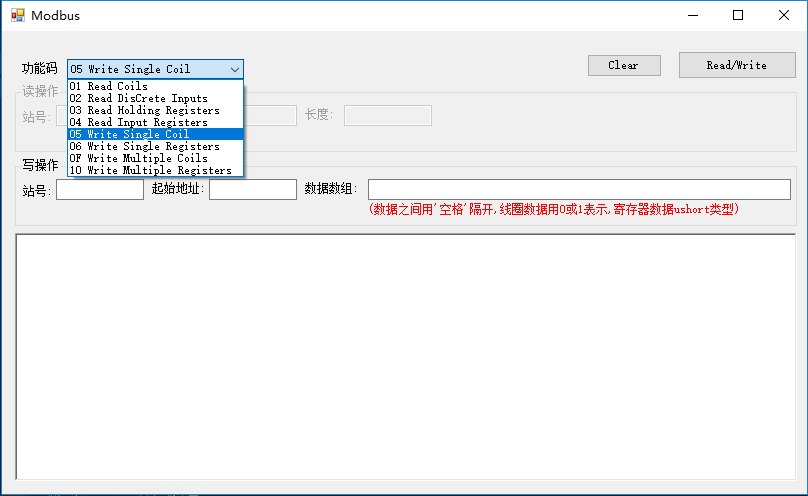
- 界面布局
功能测试及报文解析
这里功能测试我们需要借助测试工具 Modbus Slave(Modbus从站客户端)
链接:https://pan.baidu.com/s/1Z3bET3l_2a4e6cu_p250tg
提取码:hq1r
简单说明一下,这里我实现了常用的几个功能码
-
0x01 读一组线圈
-
0x02 读一组输入线圈/离散量线圈
-
0x03 读一组保持寄存器
-
0x04 读一组输入寄存器
-
0x05 写单个线圈
-
0x06 写单个保持寄存器
-
0x0F 写多个线圈
-
0x10 写多个保持寄存器
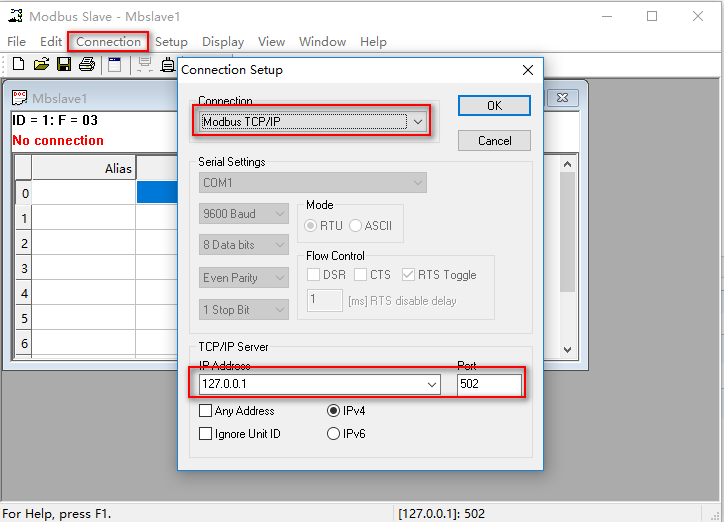
简单说一下Modbus Slave 的操作, 打开连接,建立连接,选择连接方式为Tcp/Ip, 设置Ip和端口号
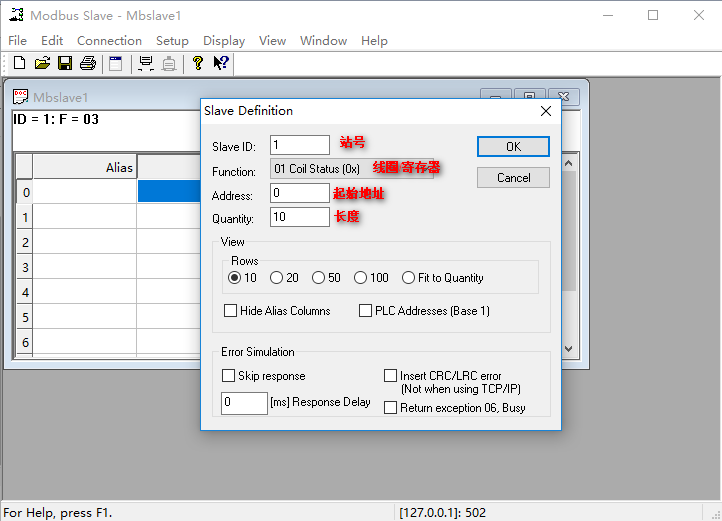
选择线圈或寄存器
点击Setup->Slave Definition,这里的Function我们需要读/写什么线圈或寄存器就对应选择
测试1
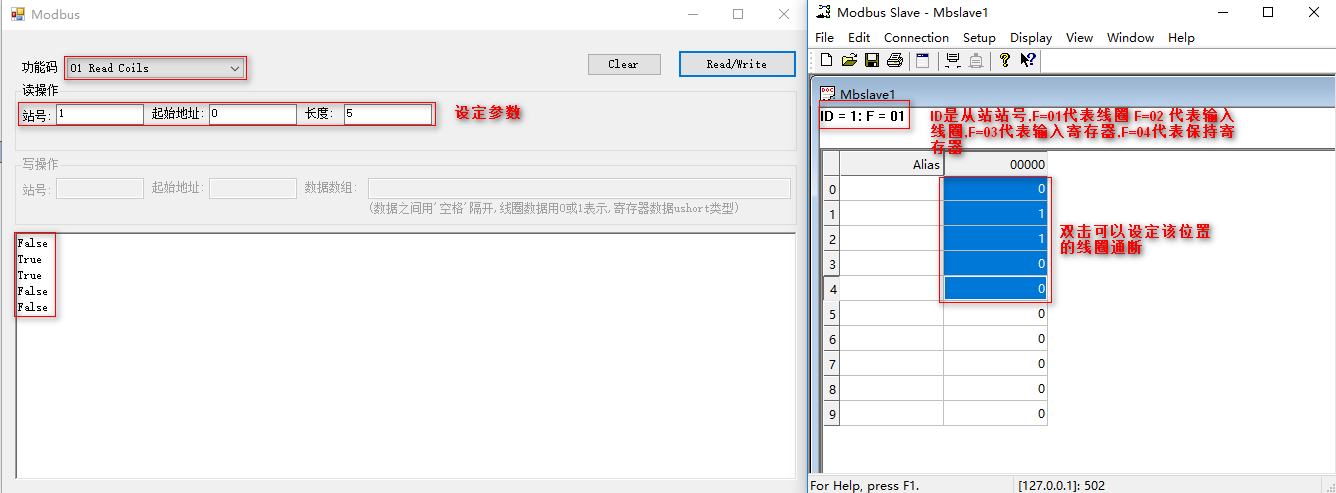
功能码0x01
这里我们所有的测试从站都使用站号1 起始地址0 长度10
功能码0x01 读取线圈 Modbus Slave的Function选择 01 Coil Status(0x)
测试结果:
点击 Display->Communication 可以截取报文,不知道为什么他报文字体那么小😱
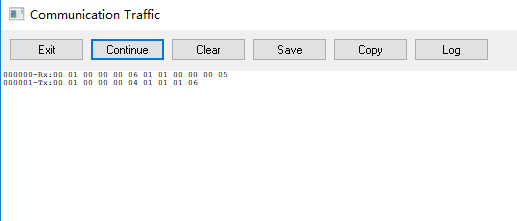
000000-Rx:00 01 00 00 00 06 01 01 00 00 00 05 000001-Tx:00 01 00 00 00 04 01 01 01 06
测试2
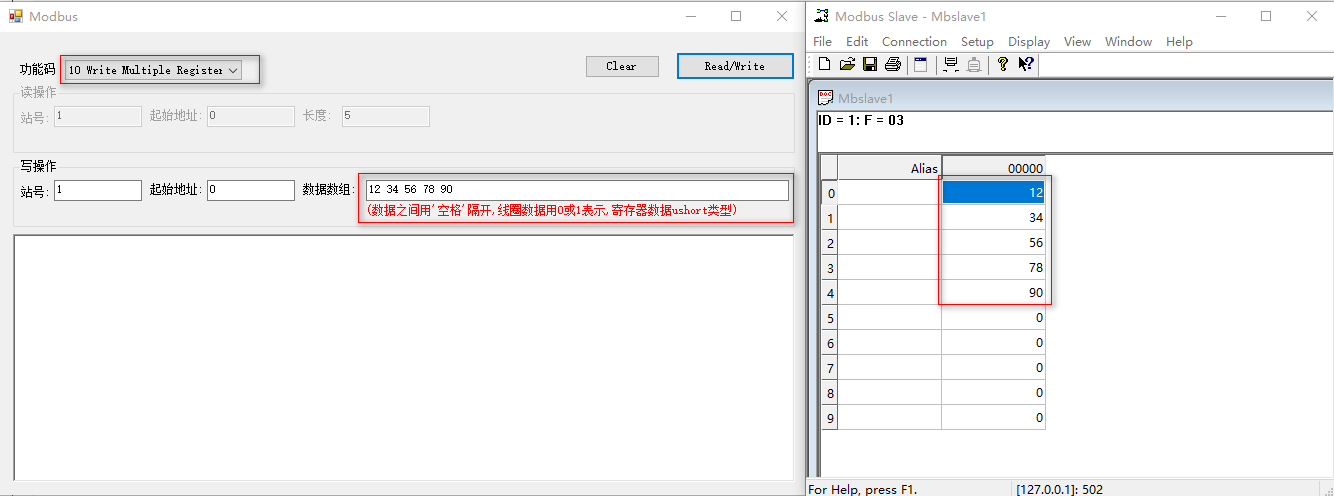
功能码0x10
功能码0x10 写入一组数据到保持寄存器 Modbus Slave的Function选择03 Holding Register(4x) (说明一下 线圈和保持寄存器才有写操作)
测试结果
报文
000070-Rx:00 01 00 00 00 11 01 10 00 00 00 05 0A 00 0C 00 22 00 38 00 4E 00 5A 000071-Tx:00 01 00 00 00 06 01 10 00 00 00 05
上文测试了一个读操作和一个写操作,其他功能码的测试与上文一致,有兴趣的可以自行测试。
本文作者:Peter.Pan
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!